Speed Motor's Variator Using STM32
La variation de vitesse de moteur a courant continu dans cet article est bas�e sur le protocole PWM qu'on peut le d�finir comme ceci :
La variation de vitesse de moteur a courant continu dans cet article est bas�e sur le protocole PWM qu'on peut le d�finir comme ceci :
PWM
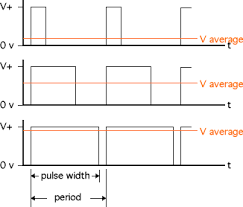
La modulation de largeur d'impulsions (MLI ; en anglais : Pulse Width Modulation, soit PWM), est une technique couramment utilis�e pour synth�tiser des signaux continus � l'aide de circuits � fonctionnement tout ou rien, ou plus g�n�ralement � �tats discrets.
Le principe g�n�ral est qu'en appliquant une succession d'�tats discrets pendant des dur�es bien choisies, on peut obtenir en moyenne sur une certaine dur�e n'importe quelle valeur interm�diaire.
Ce ph�nom�ne est fortement recommand� pour assurer la variation de vitesse de moteur a courant continu, aujourd'hui je vais vous d�montrer comment on peut g�n�rer un signal PWM d�une STM32 et visualiser son pr�sence sur des diodes LEDs.
Voici un exemple de comment on genere un signal PWM using Mikro C for ARM et STM32F4:
//Let's Electronic By Aymen Lachkhem
// www.letselectronic.blogspot.com
// Hello in this tutoriel we are going to use 4 buttons (digital Input), the first two will increase and decrease the current duty for the
// first Led and the second two will make the same thing with the other Led.
unsigned int current_duty, old_duty, current_duty1, old_duty1;
unsigned int pwm_period1, pwm_period2;
void InitMain() {
GPIO_Digital_Input (&GPIOA_BASE, _GPIO_PINMASK_3 | _GPIO_PINMASK_4 | _GPIO_PINMASK_5 | _GPIO_PINMASK_6); // configure PORTA pins as input
}
void main() {
InitMain();
current_duty = 100; // initial value for current_duty
current_duty1 = 100; // initial value for current_duty1
pwm_period1 = PWM_TIM1_Init(5000);
pwm_period2 = PWM_TIM4_Init(5000);
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // Set current duty for PWM_TIM1
PWM_TIM4_Set_Duty(current_duty1, _PWM_NON_INVERTED, _PWM_CHANNEL2); // Set current duty for PWM_TIM4
PWM_TIM1_Start(_PWM_CHANNEL1, &_GPIO_MODULE_TIM1_CH1_PE9);
PWM_TIM4_Start(_PWM_CHANNEL2, &_GPIO_MODULE_TIM4_CH2_PD13);
while (1) { // endless loop
if (GPIOA_IDR.B3) { // button on RA3 pressed
Delay_ms(1);
current_duty = current_duty + 5; // increment current_duty
if (current_duty > pwm_period1) { // if we increase current_duty greater then possible pwm_period1 value
current_duty = 0; // reset current_duty value to zero
}
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // set newly acquired duty ratio
}
if (GPIOA_IDR.B4) { // button on RA4 pressed
Delay_ms(1);
current_duty = current_duty - 5; // decrement current_duty
if (current_duty > pwm_period1) { // if we decrease current_duty greater then possible pwm_period1 value (overflow)
current_duty = pwm_period1; // set current_duty to max possible value
}
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // set newly acquired duty ratio
}
if (GPIOA_IDR.B5) { // button on RA5 pressed
Delay_ms(1);
current_duty1 = current_duty1 + 5; // increment current_duty
if (current_duty1 > pwm_period2) { // if we increase current_duty1 greater then possible pwm_period2 value
current_duty1 = 0; // reset current_duty1 value to zero
}
PWM_TIM4_Set_Duty(current_duty1, _PWM_NON_INVERTED, _PWM_CHANNEL2); // set newly acquired duty ratio
}
if (GPIOA_IDR.B6) { // button on RA6 pressed
Delay_ms(1);
current_duty1 = current_duty1 - 5; // decrement current_duty
if (current_duty1 > pwm_period2) { // if we decrease current_duty1 greater then possible pwm_period1 value (overflow)
current_duty1 = pwm_period2; // set current_duty to max possible value
}
PWM_TIM4_Set_Duty(current_duty1, _PWM_NON_INVERTED, _PWM_CHANNEL2);
}
Delay_ms(1); // slow down change pace a little
}
} Voici une d�monstration vid�o de fonctionnement :
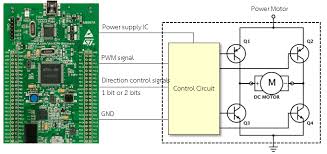
L�objectif de ce tutoriel est de mettre en oeuvre le contr�le de vitesse de moteur a courant continu de fa�on autonome
Pour ceci on aura besoin de
Un Moteur DC
STM32 F4
Transistor TIP122
Diode
Deux boutons poussoirs
deux r�sistances 1 K
Le principe est tout � fait simple on aura deux boutons poussoirs ou la premi�re va incr�menter la vitesse de moteur et la deuxi�me va faire exactement le contraire.
L�incr�mentation continuera jusqu�� alimenter le moteur en r�gime de rapport cyclique complet puis conditionnement une autre incr�mentation va le remettre a 0 tour/s, le m�me truc se passe avec la d�cr�mentation de rapport d�ja nul va le rendre on vitesse maximale.
Voici un exemple de comment on varie le vitesse de moteur a courant continu using Mikro C for ARM et STM32F4:
//Let's Electronic By Aymen Lachkhem
// www.letselectronic.blogspot.com
// In This Tutorial We are going to control the speed of dc motor using Stm32 PWM.
unsigned int current_duty, old_duty;
unsigned int pwm_period1, pwm_period2;
void InitMain() {
GPIO_Digital_Input (&GPIOA_BASE, _GPIO_PINMASK_3 | _GPIO_PINMASK_4 ); // configure PORTA pins as speed control input
}
void main() {
InitMain();
current_duty = 100; // initial value for current_duty
pwm_period1 = PWM_TIM1_Init(5000);
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // Set current duty for PWM_TIM1
PWM_TIM1_Start(_PWM_CHANNEL1, &_GPIO_MODULE_TIM1_CH1_PE9);
while (1) { // endless loop
if (GPIOA_IDR.B3) { // button on RA3 pressed
Delay_ms(1);
current_duty = current_duty + 1; // increment speed
if (current_duty > pwm_period1) { // if we increase current_duty greater then possible pwm_period1 value
current_duty = 0; // reset current_duty value to zero
}
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // set newly acquired duty ratio
}
if (GPIOA_IDR.B4) { // button on RA4 pressed
Delay_ms(1);
current_duty = current_duty - 3; // decrement speed
if (current_duty > pwm_period1) { // if we decrease current_duty greater then possible pwm_period1 value (overflow)
current_duty = pwm_period1; // set current_duty to max possible value
}
PWM_TIM1_Set_Duty(current_duty, _PWM_NON_INVERTED, _PWM_CHANNEL1); // set newly acquired duty ratio
}
Delay_ms(1); // slow down change pace a little
}
} Voici une d�monstration vid�o de fonctionnement :
No comments:
Post a Comment