Let's get PWM Using Spartan 3E
Dans la meme s�rie de tutoriels que j'ai fait au but de la d�couverte de technologie FPGA et en particulier la carte Spartan 3E, Aujourd'hui je vais vous montrer comment on fait pour generer un signal PWM (pulse widh modulation), vous expliquer les �tapes de programmation que j'ai fait en passant par un test pratique d�monstratif.

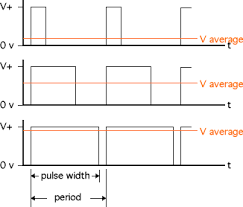
La modulation de largeur d'impulsions (MLI ; en anglais : Pulse Width Modulation, soit PWM), est une technique couramment utilis�e pour synth�tiser des signaux continus � l'aide de circuits � fonctionnement tout ou rien, ou plus g�n�ralement � �tats discrets.
Le principe g�n�ral est qu'en appliquant une succession d'�tats discrets pendant des dur�es bien choisies, on peut obtenir en moyenne sur une certaine dur�e n'importe quelle valeur interm�diaire.
Ce ph�nom�ne est fortement recommand� pour assurer la variation de vitesse de moteur a courant continu, aujourd'hui je vais vous d�montrer comment on peut g�n�rer un signal PWM d'une carte FPGA Spartan 3E et visualiser son pr�sence sur des diodes LEDs.

Passons maintenant au programmation;
Voici le programme du projet :
PWM Top Code :
----------------------------------------------------------------------------------
-- Company: There is no company
-- Engineer: Aymen Lachkhem
--
-- Create Date: 02:27:11 03/27/2016
-- Design Name:
-- Module Name: counter - Behavioral
-- Project Name:
-- Target Devices:
-- Tool versions:
-- Description:
--
-- Dependencies:
--
-- Revision:
-- Revision 0.01 - File Created
-- Additional Comments:
--
----------------------------------------------------------------------------------
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity top is
Port (
clk : in std_logic;
pwm_out : out std_logic;
rotary_a : in std_logic;
rotary_b : in std_logic
);end top;
architecture Behavioral of top is
component pwm
port(
clk: in std_logic;
pwm_var: in std_logic_vector(7 downto 0);
pwm_out: out std_logic);
end component;
component rotary
port(
pwm_var : out std_logic_vector(7 downto 0);
rotary_a : in std_logic;
rotary_b : in std_logic;
clk : in std_logic);
end component;
signal pwm_var: std_logic_vector (7 downto 0);
begin
U1 : pwm
port map(
clk => clk,
pwm_var=>pwm_var,
pwm_out=>pwm_out
);
U2 : rotary
port map(
pwm_var=>pwm_var,
rotary_a=>rotary_a,
rotary_b=>rotary_b,
clk =>clk
);
end Behavioral;
Pour les configurations physiques de mon programme avec la carte Spartan 3E j'ai choisis ces entr�es sorties:
NET "clk" PERIOD = 20.0ns HIGH 50%;
NET "clk" LOC = "C9" | IOSTANDARD = LVTTL;
NET "rotary_a" LOC = "K18" | IOSTANDARD = LVTTL | PULLUP;
NET "rotary_b" LOC = "G18" | IOSTANDARD = LVTTL | PULLUP;
NET "pwm_out" LOC = "D5" | IOSTANDARD = LVTTL | SLEW = SLOW | DRIVE = 6 ;
Le programme TOP il inclus deux component que j'ai �cris en VHDL aussi :
PWM Code :
----------------------------------------------------------------------------------
-- Company: There is no company
-- Engineer: Aymen Lachkhem
--
-- Create Date: 02:27:00 03/27/2016
-- Design Name:
-- Module Name: counter - Behavioral
-- Project Name:
-- Target Devices:
-- Tool versions:
-- Description:
--
-- Dependencies:
--
-- Revision:
-- Revision 0.01 - File Created
-- Additional Comments:
--
----------------------------------------------------------------------------------
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use ieee.numeric_std.all;
entity pwm is
port(
clk: in std_logic;
pwm_var: in std_logic_vector(7 downto 0);
pwm_out: out std_logic
);
end pwm;
architecture Behavioral of pwm is
signal counter: std_logic_vector(7 downto 0):="00000000";
signal max_counter: std_logic_vector(7 downto 0):="11111111";
begin
process(clk)
begin
if rising_edge(clk) then
counter <= std_logic_vector( unsigned(counter) + 1 );
if counter=max_counter then
counter<="00000000";
else
if counter<pwm_var then
pwm_out<='1';
else
pwm_out<='0';
end if;
end if;
end if;
end process;
end Behavioral;
Et
ROTARY ENCODER Code :
----------------------------------------------------------------------------------
-- Company: There is no company
-- Engineer: Aymen Lachkhem
--
-- Create Date: 02:24:42 03/27/2016
-- Design Name:
-- Module Name: counter - Behavioral
-- Project Name:
-- Target Devices:
-- Tool versions:
-- Description:
--
-- Dependencies:
--
-- Revision:
-- Revision 0.01 - File Created
-- Additional Comments:
--
----------------------------------------------------------------------------------
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity rotary is
Port ( pwm_var : out std_logic_vector(7 downto 0);
rotary_a : in std_logic;
rotary_b : in std_logic;
clk : in std_logic
);end rotary;
architecture Behavioral of rotary is
signal rotary_a_in : std_logic;
signal rotary_b_in : std_logic;
signal rotary_in : std_logic_vector(1 downto 0);
signal rotary_q1 : std_logic;
signal rotary_q2 : std_logic;
signal delay_rotary_q1 : std_logic;
signal rotary_event : std_logic;
signal rotary_left : std_logic;
signal led_pattern : std_logic_vector(7 downto 0):= "00000000";
begin
rotary_filter: process(clk)
begin
if clk'event and clk='1' then
rotary_a_in <= rotary_a;
rotary_b_in <= rotary_b;
rotary_in <= rotary_b_in & rotary_a_in;
case rotary_in is
when "00" => rotary_q1 <= '0';
rotary_q2 <= rotary_q2;
when "01" => rotary_q1 <= rotary_q1;
rotary_q2 <= '0';
when "10" => rotary_q1 <= rotary_q1;
rotary_q2 <= '1';
when "11" => rotary_q1 <= '1';
rotary_q2 <= rotary_q2;
when others => rotary_q1 <= rotary_q1;
rotary_q2 <= rotary_q2;
end case;
end if;
end process rotary_filter;
direction: process(clk)
begin
if clk'event and clk='1' then
delay_rotary_q1 <= rotary_q1;
if rotary_q1='1' and delay_rotary_q1='0' then
rotary_event <= '1';
rotary_left <= rotary_q2;
else
rotary_event <= '0';
rotary_left <= rotary_left;
end if;
end if;
end process direction;
-- PWM control.
led_display: process(clk)
begin
if clk'event and clk='1' then
if rotary_event='1' then
if rotary_left='1' then
led_pattern<=led_pattern+'1'; --INCREASE
else
led_pattern<=led_pattern-'1'; --DECREASE
end if;
end if;
pwm_var <= led_pattern;
end if;
end process led_display;
end Behavioral;
Le reste c'est d�impl�menter le programme pour avoir ceci :
No comments:
Post a Comment